
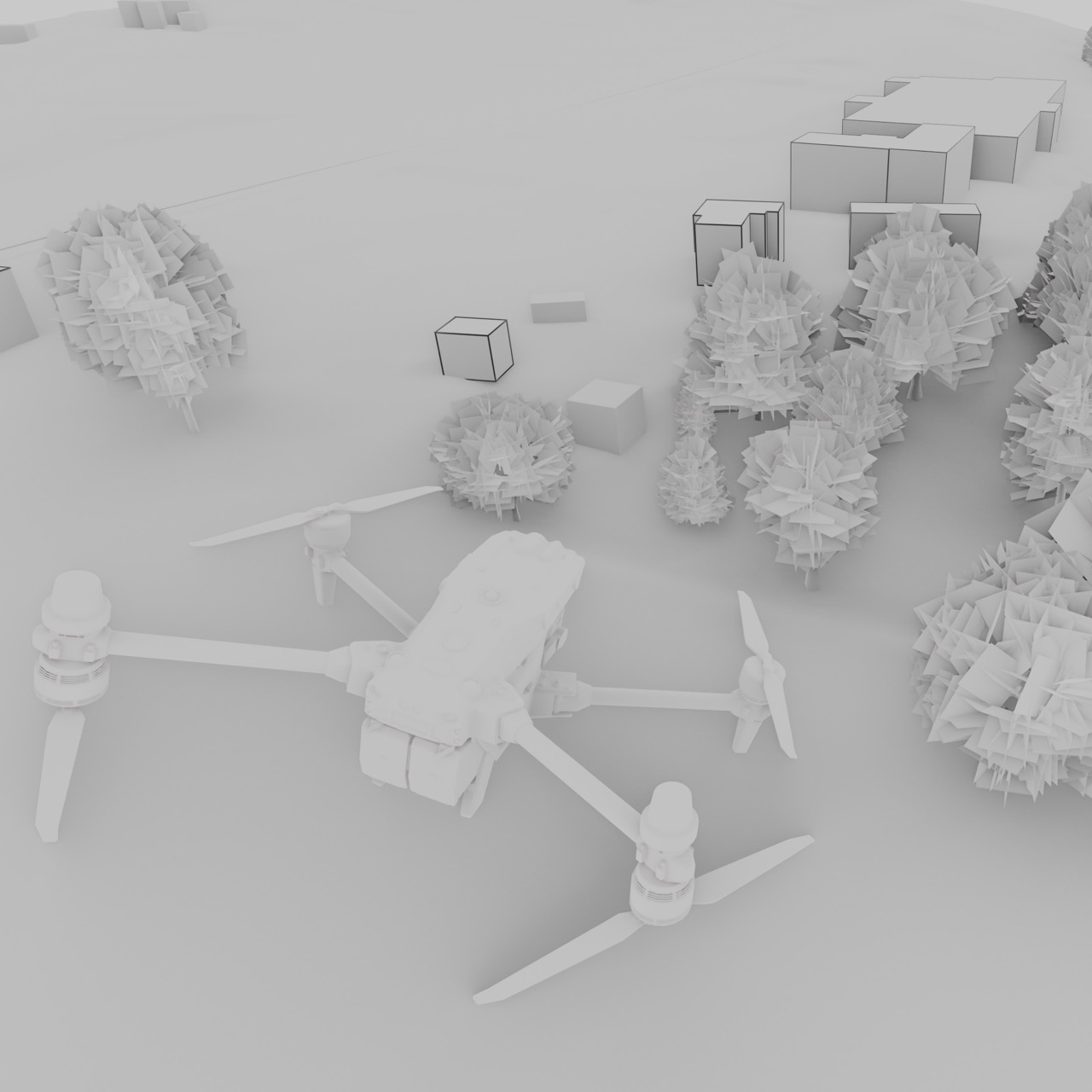
HoloOcean Underwater Simulator
Built on Unreal Engine 5, our simulator accurately models sonar, buoyancy, acoustic communications and more.
The Field Robotic Systems Lab (FROST Lab) at Brigham Young University is focused on enabling the development of robust and reliable field-robotic systems that are able to consistently perceive, navigate, and perform work in complex unstructured real-world environments.
Built on Unreal Engine 5, our simulator accurately models sonar, buoyancy, acoustic communications and more.
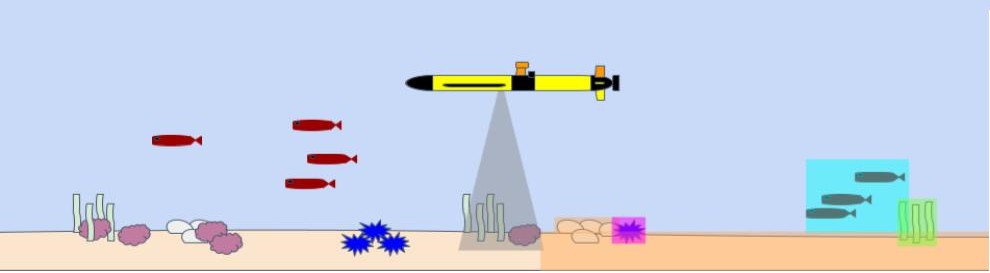
Long-rage search and track of multiple targets in uncertain and dynamic environments leveraging machine learning and informative path planning methods.
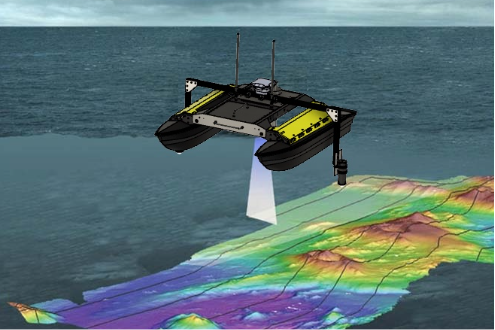
Autonomous surveying/mapping for investigating the preservation of coral reefs in Samoa and Hawaii
We are developing novel semi-supervised machine learning algorithms that will allow AUVs to more efficiently plan their own paths based on actively inferred environmental patterns in combination with pre-embedded scientific knowledge.

Improving information exchange and interaction between sensors in both single and multi-agent systems
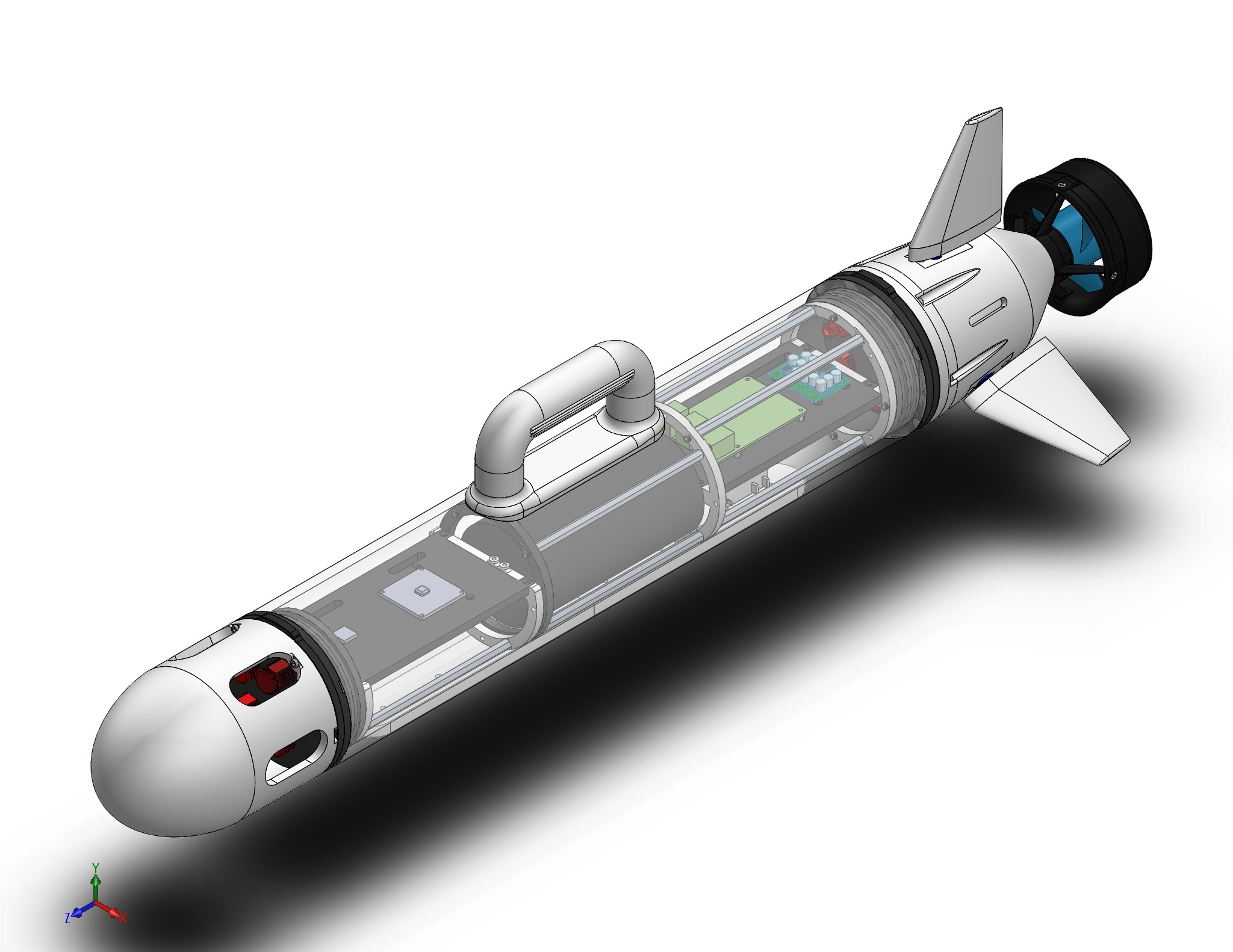
Building simple and cheap UUV vehicles used for cooperative robotic applications

The FROST Lab is developing methods to enable autonomous underwater vehicles to automatically inspect underwater structures such as ship hulls, dams, bridges, and piers.

Comparing current observations of coastline environments to previously made predictions in order to achieve localization with respect to semantically labeled maps that may be outdated, expanding the possibilities of coastal monitoring in GPS-denied situations.
Past research projects that shaped our lab’s direction and laid the groundwork for current efforts.
Autonomous fault detection and repair on self driving vehicles
Improving the efficiency of robotics perception, estimation, and planning algorithms through the use of High-Level Synthesis (HLS) to generate custom FPGA circuitry.

Using autonomous driving techniques, we are developing an autonomous all-terrain stair-climbing wheelchair that enables people with limited control to access outdoor and previously inaccessible locations.
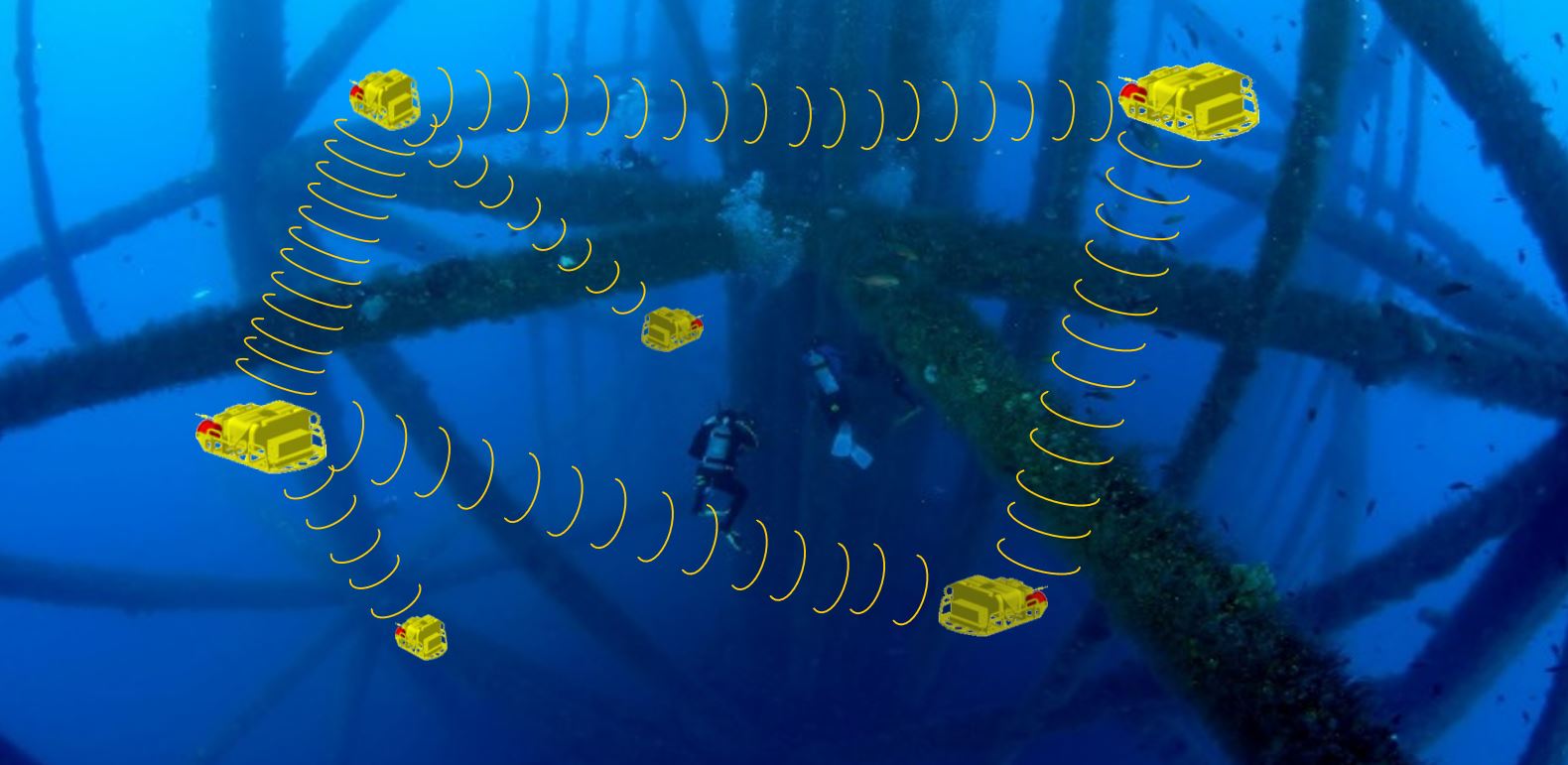
Collaborative mapping or search by multiple underwater vehicles under strict communication constraints inherent to the underwater domain.