Kostas Alexis
From Autonomous Exploration to Embodied Q&A
Norwegian University of Science and Technology, Norway
The event combines Invited Talks from academia and industry experts presenting recent progress, poster presentations for invited workshop paper submissions, and an open-source simulation competition focused on indoor exploration.
Contributions
Call for Papers
Accepted papers will be presented at the workshop poster session. A chance to get in front of leading industry members and recruiters.
Simulation Competition
Winners will present their approach at the workshop. Chance to showcase your algorithms in informative path planning and test them against world class competitiors.
Speakers
Invited speakers will present the latest perspectives and research in intelligent information gathering with a focus on active perception, exploration planning, and decision-making under uncertainty.
From Autonomous Exploration to Embodied Q&A

Title Pending

Title Pending

Title Pending

Multi-level Semantic Understanding and Efficient Manipulation: Towards Advanced Flight Intelligence

Title Pending
Program
Bringing together academic and industry professionals while fostering communication and innovation through the sharing of varied research, industry experiences, and perspectives.
From Autonomous Exploration to Embodied Q&A
Title Pending
Title Pending
Title Pending
Multi-level Semantic Understanding and Efficient Manipulation: Towards Advanced Flight Intelligence
Title Pending
Contributions
Prospective authors are invited to submit high-quality papers representing original work. Innovative submissions in all areas of information gathering are welcome. Accepted papers will be presented in an interactive poster session at the IROS 2026 conference and hosted on the workshop website as non-archival submissions.
Submission overview
Review
Papers should be submitted by the submission deadline. An alternative late-breaking results deadline is provided an option for authors who do not need advance notice of acceptance to attend the workshop. However, late-breaking results will have very limited time for rebuttal/comments.
Paper length
Papers should be 3-6 pages in length including all appendices.
Submission format
All papers must be in English and submitted electronically in PDF format. Use of the conference template is recommended.
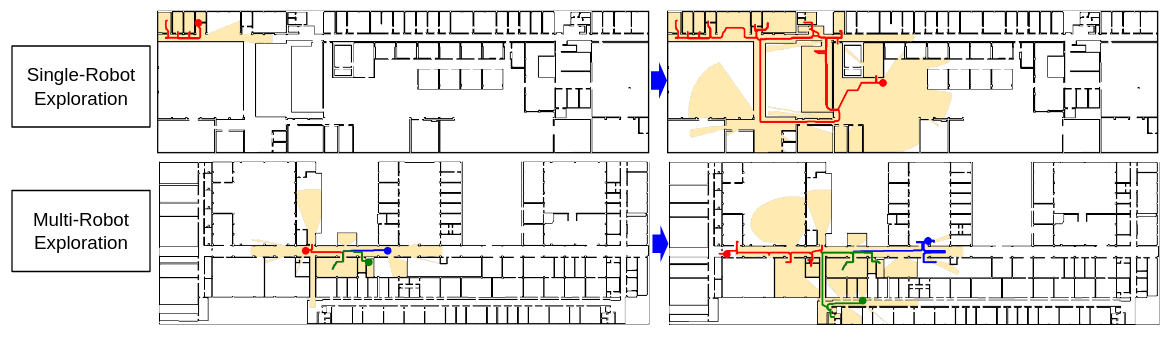
Competition
The competition includes both single-robot and multi-robot tracks to highlight challenges in exploration performance, mission efficiency, and coordination under communication constraints. Competitors choose to enter either the single-robot track, or the multi-robot track, or both. If entering both tracks, competitors may submit a single method for both tracks or may submit a method for each track. Participant's algorithms will be evaluated based on coverage of previously unknown environments and efficient use of mission budgets, with the winners of the challenge presenting their approach as part of the workshop program.
Evaluation
Submissions will be evaluated in two rounds. The first round is optional and will provide ranking feedback on a limited portion of the held-back indoor map dataset. The second round is the final submission and will evaluate submissions on the entire held-back dataset. Of course, this testing dataset will not be provided and so participating in the optional feedback round is encouraged.
Competitors who choose to enter track 1 must have a single robot efficiently explore an unknown indoor map and maximize the amount of useful information collected within the allotted budget.
Competitors who choose to enter track 2 must have a team of robots collaboratively explore the same unknown indoor map. The robots are expected to share information and coordinate their motion so as to reduce redundant coverage and improve exploration efficiency.
Behind the Workshop
Our committee members bring extensive experience from past workshops and competitions at conferences including IROS, ICRA, AAAI, and CDC.